
I am an Embodied AI student researcher currently working at Northeastern University (Foshan), under the supervision of Professor Xiaoguang Ma. Recently, I am focusing on research in Agentic UAVs. Prior to this, I received my Master’s degree in Electronic Information from Zhejiang University of Technology in June 2024, where my work was dedicated to developing visual Simultaneous Localization and Mapping (vSLAM) algorithms for ground mobile robots to achieve visual navigation in dynamic scenes.
More about me: Email / Google Scholar / Github / Curriculum Vitae
Feel free to contact me by email if you are interested in discussing or collaborating with me.
📚 Research Vision
My current research focuses on developing self-improving / self-evolving embodied navigation agents, and exploring their applications in aerial and ground robots. In the long run, my research vision is to build an embodied agent that can autonomously perceive, make decisions, and learn continuously like humans. To achieve this, I primarily focus on:
- Language-driven visual navigation (e.g., VLN and ObjectNav).
- Large foundation models (e.g., LLMs and VLMs) and their training techniques.
- Lifelong learning of LLM / VLM-powered agents.
- Vision-Language-Action models and their applications.
- World models and their applications.
🔥 News
- 2026.03: 🎉🎉 Our works “PM-Nav, CMMR-VLN, ViSA-Enhanced Aerial VLN” are unveiled on Arxiv!
- 2025.10: 🎉🎉 One national invention patent on visual SLAM is authorized!
- 2025.07: 🎉🎉 Our work “SE-VLN” is unveiled on Arxiv! [视觉语言导航]
- 2025.06: 🎉🎉 One national invention patent on visual SLAM is authorized!
- 2024.09: 🎉🎉 One paper is accepted to Chinese Journal of Sensors and Actuators about visual SLAM!
- 2024.06: 🎉🎉 I obtain my Master's degree from Zhejiang University of Technology!
- 2024.05: 🎉🎉 I join Professor Xiaoguang Ma's laboratory!
- 2024.03: 🎉🎉 One paper is accepted to IEEE DDCLS 2024 about visual SLAM!
- 2023.05: 🎉🎉 I give an oral presentation on visual SLAM at IEEE DDCLS 2023!
- 2022.04: 🎉🎉 One national invention patent on unmanned boats is authorized!
- 2021.06: 🎉🎉 I obtain my Bachelor's degree from Nantong University!
- 2021.05: 🎉🎉 Our UAV project successfully pass the conclusion assessment!
- 2020.05: 🎉🎉 Our unmanned boat project successfully pass the conclusion assessment!
- 2019.05: 🎉🎉 Our unmanned boat work is selected for the Jiangsu Provincial College Students' Science and Technology Innovation Achievement Exhibition!
- 2019.05: 🎉🎉 I preside over a National Undergraduate Training Program for Innovation and Entrepreneurship project on unmanned aerial vehicles (UAVs).
- 2019.05: 🎉🎉 I participate in a National Undergraduate Training Program for Innovation and Entrepreneurship project on unmanned boats.
- 2018.10: 🎉🎉 I join the Intelligent Transportation Laboratory, supervised by Professor Shi Quan!
📝 Selected Publications
Xiangyu Dong *, Haoran Zhao *, Jiang Gao, Haozhou Li, Xiaoguang Ma †, Yaoming Zhou †, Fuhai Chen, Juan Liu.
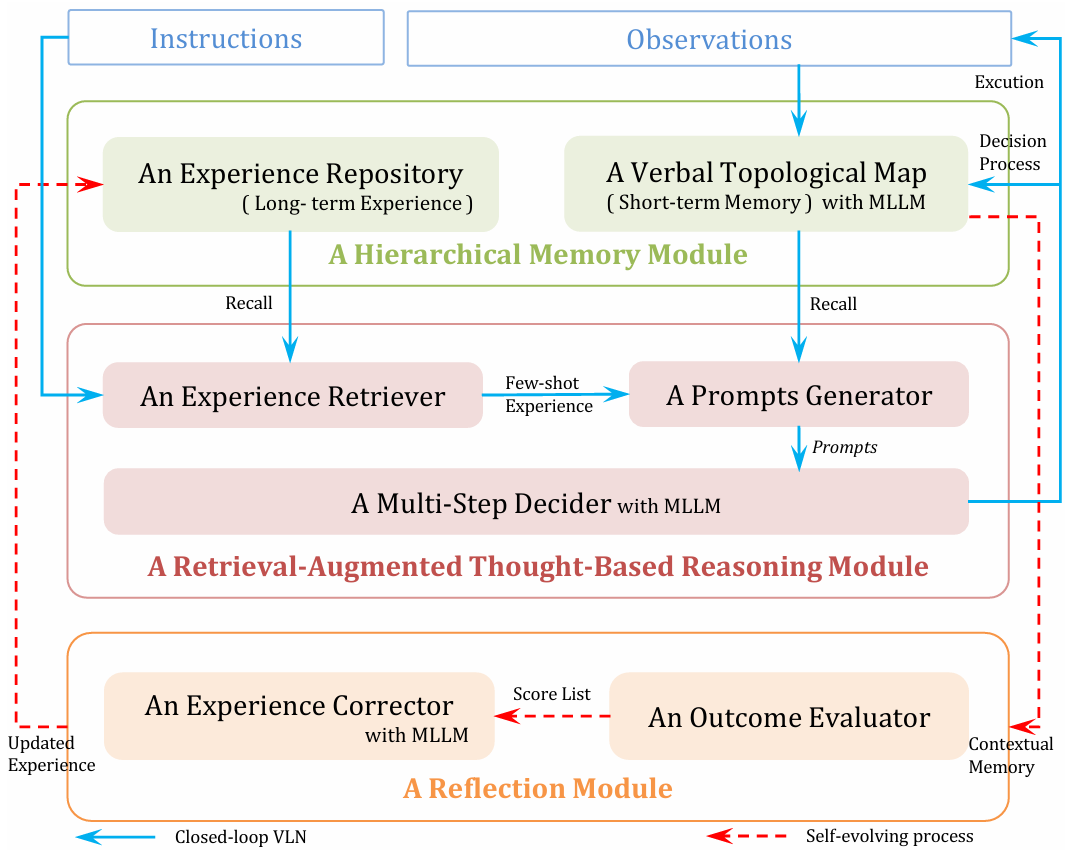
- We drew inspiration from the evolution capabilities of natural agents, and proposed a self-evolving VLN framework (SE-VLN) to endow VLN agents with the ability to continuously evolve during testing. To the best of our knowledge, it was the first time that an multimodal LLM-powered training-free self-evolving VLN framework was proposed.
- SEMA-VLN: A Self-Evolving Multi-Agent Vision-Language Navigation Framework Based on Foundation Models, Xiangyu Dong, Haozhou Li, Xiaoguang Ma †, Wei Meng, Zhengtao Hu.
- CMMR-VLN: Vision-and-Language Navigation via Continual Multimodal Memory Retrieval, Haozhou Li *, Xiangyu Dong *, Huiyan Jiang, Yaoming Zhou, Xiaoguang Ma †.
- PM-Nav: Prior-Map Guided Embodied Navigation in Functional Buildings, Jiang Gao *, Xiangyu Dong *, Haozhou Li, Haoran Zhao, Yaoming Zhou, Xiaoguang Ma †.
- ViSA-Enhanced Aerial VLN: A Visual-Spatial Reasoning Enhanced Framework for Aerial Vision-Language Navigation, Haoyu Tong *, Xiangyu Dong *, Haoran Zhao, Yaoming Zhou †, Xiaoguang Ma †.
(co-first authors: *, corresponding authors: †)
🎖 Honors and Awards
- 2023: Second-Class Academic Scholarship, Zhejiang University of Technology.
- 2022: First-Class Academic Scholarship, Zhejiang University of Technology.
- 2022: Second Prize in the East China Division, China Graduate Electronic Design Competition.
- 2021: Freshman Scholarship, Zhejiang University of Technology.
- 2021: Excellent Undergraduate Graduation Thesis, Nantong University.
- 2021: Outstanding Student, School of Transportation and Civil Engineering, Nantong University.
- 2019: First Prize in the East Division, National College Student Embedded Chip and System Design Competition.
- 2019: Second Prize, Jiangsu Provincial “Internet +” College Student Innovation and Entrepreneurship Competition.
- 2019: Second Prize, Nantong University “Internet +” College Student Innovation and Entrepreneurship Competition.
📖 Educations
- 2021.09 - 2024.06: Master, College of Information Engineering, Zhejiang University of Technology, Hangzhou, China.
- 2017.09 - 2021.06: Bachelor, School of Transportation and Civil Engineering, Nantong University, Nantong, China.
💬 Reports
- 2023.05: “A Robust Visual SLAM Based on Key Point Instantaneous Rate Identification in Dynamic Environments”, 2023 IEEE 12th Data Driven Control and Learning Systems Conference (DDCLS).
💻 Internships
- 2025.05 - Present: Beihang University–Tianmushan Laboratory, co-supervisor: Professor Yaoming Zhou.
- 2024.05 - 2026.08: Northeastern University, supervisor: Professor Xiaoguang Ma.
🛠 Social Services
- Reviewer: AAAI 2026, IROS2026.